
Deep learning for automated MRE Quality Assessment and Liver Stiffness Measurement
Piezoelectric MRE multi actuators
The Biorobotics and Human Modeling Laboratory conducts research in Magnetic Resonance Elastography (MRE), a non-invasive imaging technique that quantifies tissue stiffness by visualizing mechanical waves propagating through tissues. Our work focuses on two primary research areas:
1. Novel Actuator Technology for MRE
Our lab has developed tunable resonant actuators specifically for MRE applications. These MRI-compatible actuators generate precise mechanical vibrations necessary for high-quality elastography imaging while maintaining compatibility with the strong magnetic field environment of MRI scanners. Our actuator designs feature:
- Adjustable frequency response for multi-frequency MRE applications
- Enhanced wave propagation for improved imaging of small, geometrically complex targets
- Optimized driver placement for consistent wave generation
- MRI-compatibility through careful material selection and design
This work is supported by a CDMRP Discovery Award focusing on tunable resonant actuation for magnetic resonance elastography of active tissues.
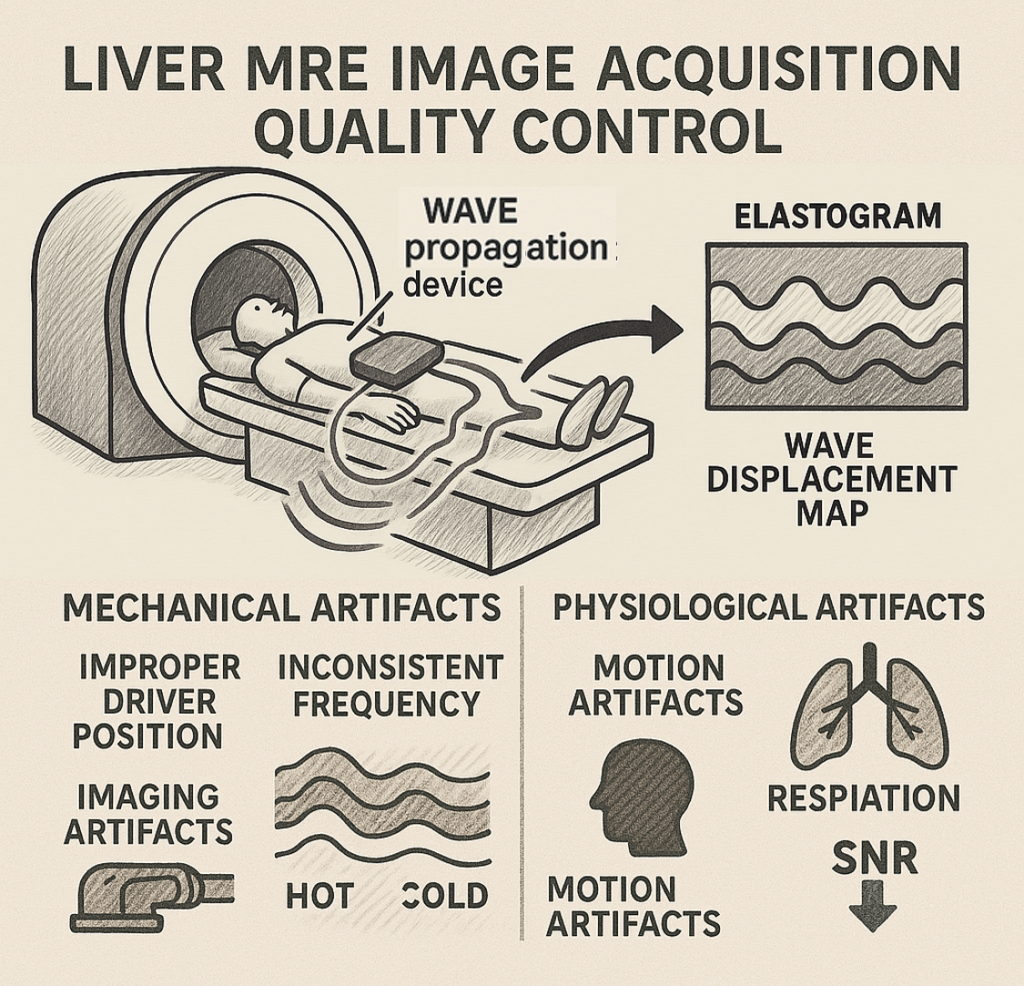
2. Deep Learning for MRE Quality Assessment
In collaboration with the Icahn School of Medicine at Mount Sinai, our team has pioneered automated quality control systems for MRE imaging. This research employs deep learning techniques to:
- Automatically assess the diagnostic quality of liver MRE images
- Detect insufficient wave propagation and other image quality issues
- Provide real-time feedback during MRE procedures
- Enable more reliable stiffness measurements and improved diagnostic accuracy
Our deep learning models have achieved high accuracy in classifying MRE image quality, potentially reducing the need for repeat examinations and improving clinical workflow.
References Cited
[1] H. A. Nieves-Vazquez, E. Ozkaya, W. Meinhold, A. Geahchan, O. Bane, J. Ueda, and B. Taouli, “Deep Learning-Enabled Automated Quality Control for Liver MR Elastography: Initial Results,” Journal of Magnetic Resonance Imaging, 2024. DOI: 10.1002/jmri.29490
[2] H. Nieves-Vazquez, E. Ozkaya, W. Meinhold, J. Ueda, “Effects of Driver Placement and Phase on Multi-actuator Magnetic Resonance Elastography via Finite Element Analysis,” American Control Conference (ACC), 2023, San Diego, CA, June 2023.
[3] W. Meinhold, E. Ozkaya, J. Ueda, M. Kurt, “Tuneable Resonance Actuators for Magnetic Resonance Elastography,” Proceedings of the 2019 Design of Medical Devices Conference, 2019. DOI: 10.1115/DMD2019-3313
[4] E. Ozkaya, E. R. Triolo, F. Rezayaraghi, J. Abderezaei, W. Meinhold, K. Hong, A. Alipour, P. Kennedy, L. Fleysher, J. Ueda, P. Balchandani, M. Eriten, C. L. Johnson, Y. Yang, M. Kurt, “Brain-mimicking phantom for biomechanical validation of motion sensitive MR imaging techniques,” Journal of the Mechanical Behavior of Biomedical Materials, vol. 122, 2021. DOI: 10.1016/j.jmbbm.2021.104680
[5] W. Meinhold, H. Nieves-Vazquez, D. E. Martinez, J. Lee, S. Li, J. Ueda, A. Hu, “A Virtual Reality Guidance System for a Precise MRI Injection Robot,” IEEE/SICE International Symposium on System Integrations (SII), 2023.
[6] W. Meinhold, A. Hu, D. Martinez, J. Oshinski, J. Ueda, “Systems and Methods for Magnetic Resonance Imaging Guided Robotics,” US Patent Application 17/404,619, Filed: August 17, 2021.
[7] J. Ueda, H. A. Nieves-Vazquez, “Deep Learning-Based Diagnostic Quality Prediction During Magnetic Resonance Elastography Data Acquisition,” US Patent Application 63/650,665, Filed On May 22, 2024.
[8] C. Hong, T. Vinodkumar, H. Nieves, and J. Ueda, “Sensor-Embedded Tissue Phantom For Magnetic Resonance Elastography Mechanical Failure Testing,” ASME Journal of Medical Devices, 2024, MED-24-1046. DOI: 10.1115/1.4066226
“Tunable resonant actuation for magnetic resonance elastography of active tissues,” CDMRP FY 2019 Discovery Award, Department of the Army, 2020-2022.