
Project Description
The Biorobotics and Human Modeling Laboratory conducts innovative research in human impedance estimation, focusing on developing novel techniques and technologies for characterizing the dynamic properties of the human body during interaction with robotic systems. This research is funded by the NSF Mind, Machine, and Motor Nexus (M3X) program, which supports fundamental research at the intersection of human cognition, machine systems, and motor control.
Research Focus Areas
1. Enhanced Physical Perturbation Methods
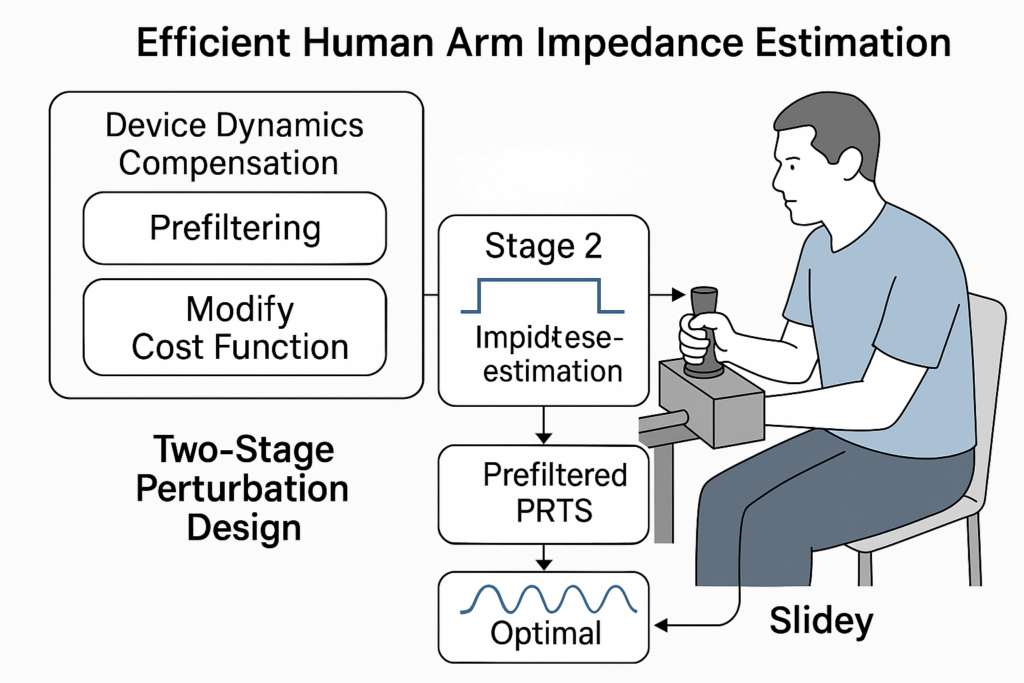
Our lab has developed advanced methodologies for generating high-quality physical perturbations necessary for accurate human biomechanical system identification. This includes:
- Metrics such as Band-limited Spectral Flatness Gain (BLSFG) to evaluate perturbation quality
- Prefilter designs that improve the spectral flatness of physical pseudorandom perturbations
- Techniques for maximizing information content in system identification experiments
These innovations enable more accurate estimation of human arm impedance parameters, providing foundational knowledge for human-robot interaction design.
2. Human-Robot Haptic Interaction
Building on our impedance estimation techniques, we have developed systems to investigate and enhance physical human-robot interaction through haptic communication:
- “Slidey,” a versatile robotic emulator for studying and altering human gait parameters through hand interactions, currently up and running at Emory Rehabilitation Hospital
- Methods for quantifying haptic communication between humans during walking
- Control strategies that adapt to changing human impedance during interaction
This work bridges fundamental biomechanics with practical applications in assistive robotics and rehabilitation.
References Cited
[1] Y. Qiu, M. Wu, L. H. Ting, and J. Ueda, “Maximum Spectral Flatness Control of a Manipulandum for Human Motor System Identification,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3271-3278, 2021. DOI: 10.1109/LRA.2021.3063964
[2] Y. Qiu, M. Wu, L. H. Ting, and J. Ueda, “Prefilter Design for Improved Spectral Flatness of Physical Pseudorandom Perturbations,” IEEE Transactions on Control Systems Technology, 2022. DOI: 10.1109/TCST.2022.3214725
[3] M. Wu, Y. Qiu, J. Ueda, and L. H. Ting, “A Versatile Emulator for Haptic Communication to Alter Human Gait Parameters,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7335-7342, 2022. DOI: 10.1109/LRA.2022.3182109
[4] M. Wu, L. Drnach, S. M. Bong, Y. S. Song, and L. H. Ting, “Human-Human Hand Interactions Aid Balance During Walking by Haptic Communication,” Frontiers in Robotics and AI, vol. 8, 2021. DOI: 10.3389/frobt.2021.735575
[5] Y. Qiu, M. Wu, L. Ting, and J. Ueda, “Identification of Human Arm Impedance using Physical Perturbations with Enhanced Spectral Properties,” IEEE Transactions on Medical Robots and Bionics submitted, March 2025.
National Science Foundation, CMMI, M3X – Mind, Machine, and Motor Nexus, “Collaborative Research: Enhancing Gait Dynamics via Physical Human-human and Human-Robot Interactions at the Hands,” NSF Award #1761679, 2018-2022. NSF Award Information